|
Masoud Moghani I am at NVIDIA GEAR and a PhD candidate at the University of Toronto, advised by Animesh Garg working at the intersection of robotics, machine learning, and simulation. My research focuses on robot learning for manipulation and deformable object simulation. I am also working on autonomy in surgical robotics. Email / Google Scholar / Twitter / YouTube / Github |

|
Publications |
|
SoftMimicGen: A Data Generation System for Scalable Robot Learning in Deformable Object Manipulation
Masoud Moghani, Mahdi Azizian, Animesh Garg, Yuke Zhu, Sean Huver*, Ajay Mandlekar* ICRA 2026: IEEE International Conference on Robotics and Automation, 2026 website SoftMimicGen, an automated data generation pipeline for deformable object manipulation tasks. |

|
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
NVIDIA arXiv 2025 website / paper / pdf Isaac Lab empowers large-scale, multi-modal learning through GPU-native robotics simulation. |
|
COBALT: Crowdsourcing Robot Learning via Cloud-Based Teleoperation with Smartphones
Ayush Agarwal*, Ansh Gandhi*, Jeremy A Collins, Omar Rayyan, Aryan Sarswat, Ranjani Koushik, Kaavya Menon, Masoud Moghani, Ajay Mandlekar, Animesh Garg ICRA 2026: IEEE International Conference on Robotics and Automation, 2026 website / video COBALT democratizes robot learning by letting hundreds of users worldwide teleoperate cloud-hosted, vectorized simulators via everyday devices. |
|
Adapt3R: Adaptive 3D Scene Representation for Domain Transfer in Imitation Learning
Albert Wilcox, Mohamed Ghanem, Masoud Moghani, Pierre Barroso, Benjamin Joffe, Animesh Garg CoRL 2025: Conference on Robot Learning, 2025 website / paper / pdf Adapt3R, an imitation learning algorithm utilizing 3D scene representations to enable zero-shot transfer to novel embodiments and camera poses. |
|
SonoGym: High Performance Simulation for Challenging Surgical Tasks with Robotic Ultrasound
Yunke Ao, Masoud Moghani*, Mayank Mittal*, Manish Prajapat, Luohong Wu, Frederic Giraud, Fabio Carrillo, Andreas Krause, Philipp Fürnstahl NeurIPS 2025: NeurIPS Datasets and Benchmarks, 2025 website / paper / pdf SonoGym, a scalable simulation platform to train robots for orthopedic surgery. |
|
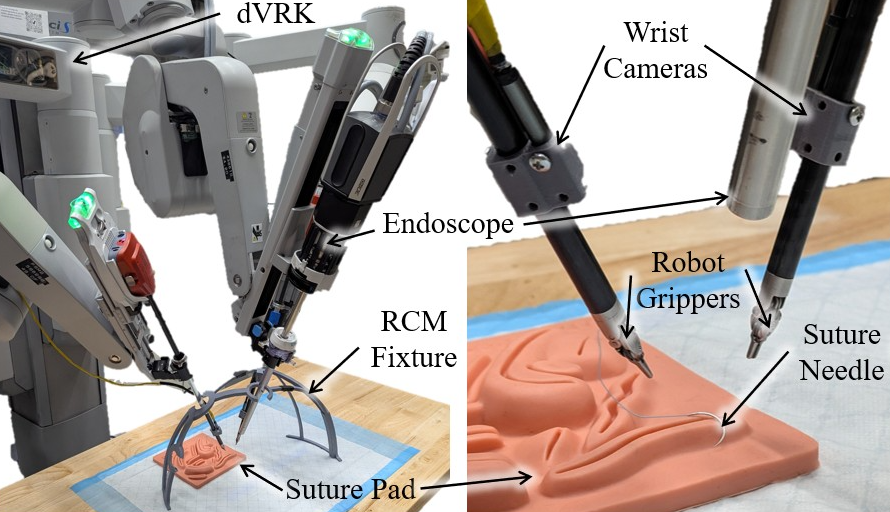
SutureBot: A Precision Framework & Benchmark For Autonomous End-to-End Suturing
Jesse Haworth*, Juo-Tung Chen*, Nigel Nelson, Ji Woong Kim, Masoud Moghani, Chelsea Finn, Axel Krieger NeurIPS 2025: NeurIPS Datasets and Benchmarks, 2025 SutureBot: an autonomous suturing benchmark on the da Vinci Research Kit (dVRK). |
|
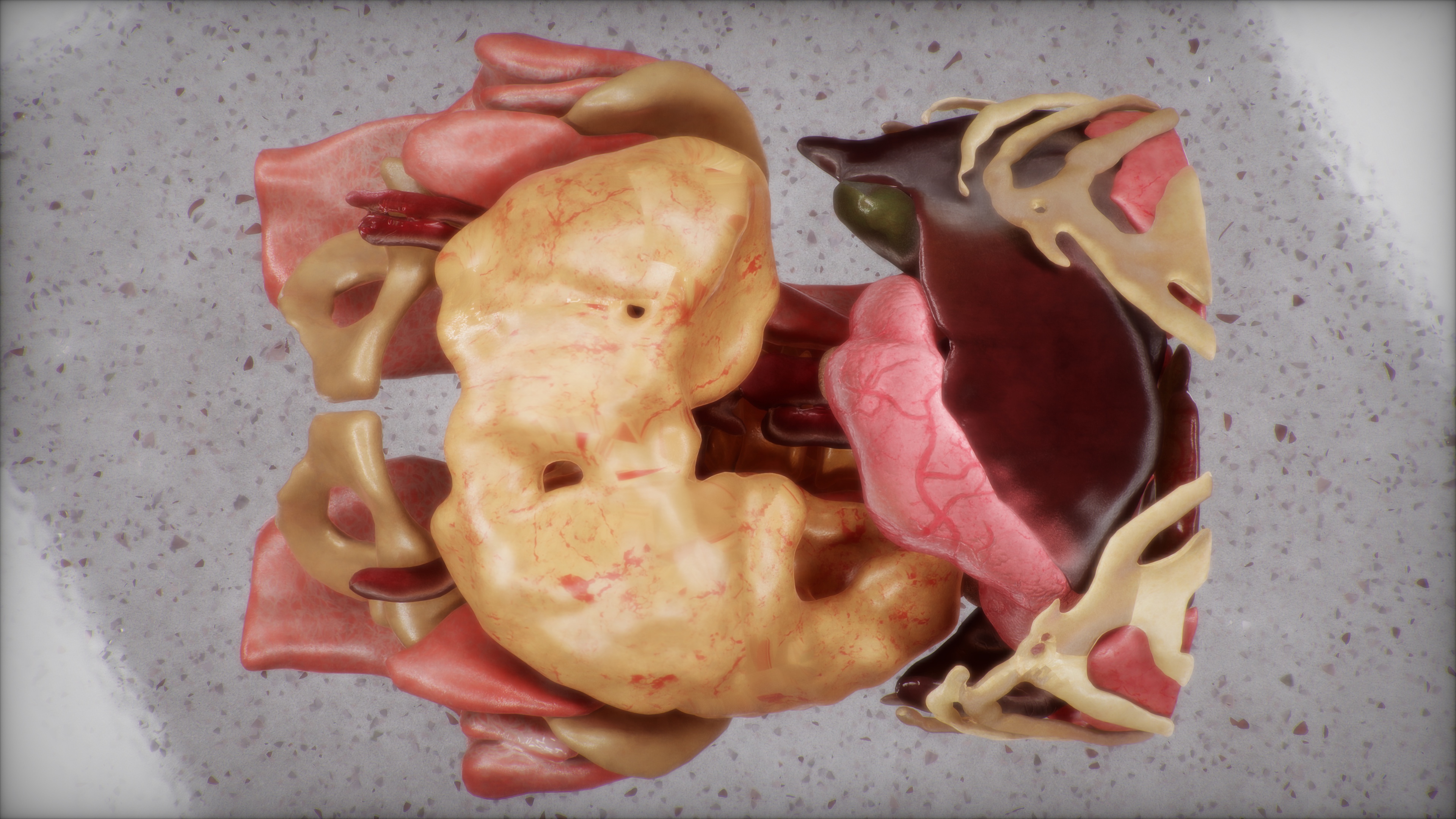
SuFIA-BC: Generating High Quality Demonstration Data for Visuomotor Policy Learning in Surgical Subtasks
Masoud Moghani, Nigel Nelson, Mohamed Ghanem, Andres Diaz-Pinto, Kush Hari, Mahdi Azizian, Ken Goldberg, Sean Huver, Animesh Garg ICRA 2025: IEEE International Conference on Robotics and Automation, 2025 website / video / paper / pdf Media Coverage: NVIDIA Developer SuFIA-BC, visual behavior cloning policies in an enhanced surgical digital twin with photorealistic human anatomical organs. |

|
SuFIA: Language-Guided Augmented Dexterity for Robotic Surgical Assistants
Masoud Moghani, Lars Doorenbos, William Chung-Ho Panitch, Sean Huver, Mahdi Azizian, Ken Goldberg, Animesh Garg IROS 2024: IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024 website / video / paper / pdf Media Coverage: New Scientist SuFIA, a framework for natural language-guided augmented dexterity for robotic surgical assistants. |

|
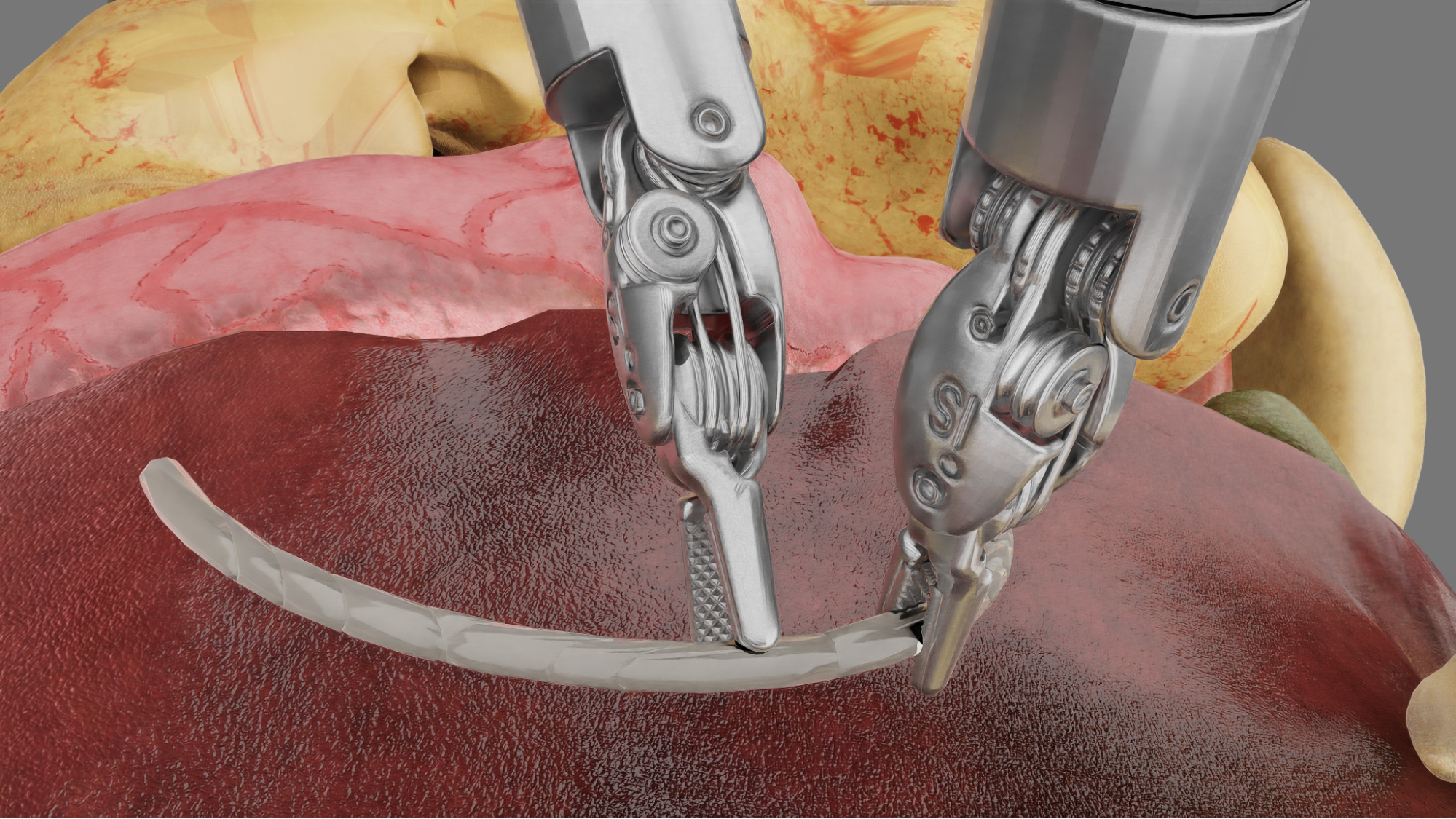
ORBIT-Surgical: An Open Simulation Framework for Accelerated Learning in Surgical Autonomy
Qinxi Yu*, Masoud Moghani*, Karthik Dharmarajan, Vincent Schorp, William Chung-Ho Panitch, Jingzhou Liu, Kush Hari, Huang Huang, Mayank Mittal, Ken Goldberg, Animesh Garg *Equal Contribution ICRA 2024: IEEE International Conference on Robotics and Automation, 2024 website / short video / long video / paper / pdf Media Coverage: NVIDIA Blog / NVIDIA Developer / Twitter (Masoud Moghani) / Twitter (Animesh Garg) / The Robot Report / The Decoder ORBIT-Surgical, a physics-based surgical robot simulation framework with photorealistic rendering. |
|
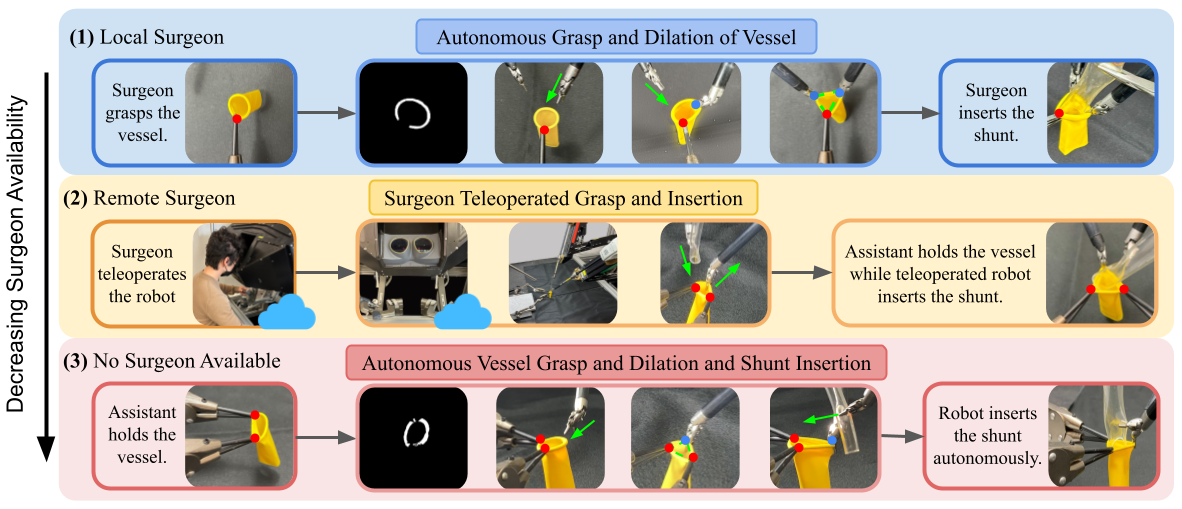
Robot-Assisted Vascular Shunt Insertion with the dVRK Surgical Robot
Karthik Dharmarajan, Will Panitch, Baiyu Shi, Huang Huang, Lawrence Yunliang Chen, Masoud Moghani, Qinxi Yu, Kush Hari, Thomas Low, Danyal Fer, Animesh Garg, Ken Goldberg JMRR 2023: Journal of Medical Robotics Research, 2023 website / paper A trimodal framework for vascular shunt insertion assisted by a da Vinci Research Kit (dVRK) robotic surgical assistant. |
|
A Small Steerable Tip Based on Dielectric Elastomer Actuators
Siyoung Lee, Masoud Moghani, Ang Li, Mihai Duduta RA-L 2023: IEEE Robotics and Automation Letters, 2023 paper A soft robotic approach for a steerable tip capable of guiding a small flexible insertion tube. |
|
|
A Lightweight Magnetorheological Actuator Using Hybrid Magnetization
Masoud Moghani, Mehrdad R. Kermani T-Mech 2019: IEEE/ASME Transactions on Mechatronics, 2019 paper / pdf The design and validation of a high-performance compliant actuator for robotic manipulators. |
|
|
Hysteresis Modeling of a Hybrid Magneto-Rheological Actuator
Masoud Moghani, Mehrdad R. Kermani AIM 2016: IEEE International Conference on Advanced Intelligent Mechatronics, 2016 paper A neural network based closed-loop torque control strategy for a compliant actuator. |
|
|
Design and Development of a Hybrid Magneto-Rheological Clutch for Safe Robotic Applications
Masoud Moghani, Mehrdad R. Kermani ICRA 2016: IEEE International Conference on Robotics and Automation, 2016 paper A novel compliant actuator for safe robotic applications. |
Technical Blogs |

|
Introducing NVIDIA Isaac for Healthcare, an AI-Powered Medical Robotics Development Platform
Mostafa Toloui, Andres Diaz-Pinto, Masoud Moghani NVIDIA Technical Blog, 2025 website / video |
|
Advancing Surgical Robotics with AI-Driven Simulation and Digital Twin Technology
Andres Diaz-Pinto, Masoud Moghani, Nigel Nelson NVIDIA Technical Blog, 2024 website / video |
Teaching |
|
CSC413H1-2516H - Neural Networks and Deep Learning (TA)
MIE404H1 - Control Systems I (Co-lecturer, 2x - Head TA) ECE470H1 - Robot Modeling and Control (2x - TA) MIE505H1 - Micro/Nano Robotics (TA) ECE 4460B - Real Time Embedded Systems (2x - TA) |
|
Source code from Jon Barron website's source code. |